Overview of the MOLA arquitecture
An overview of the MOLA architecture is given in the next figure:
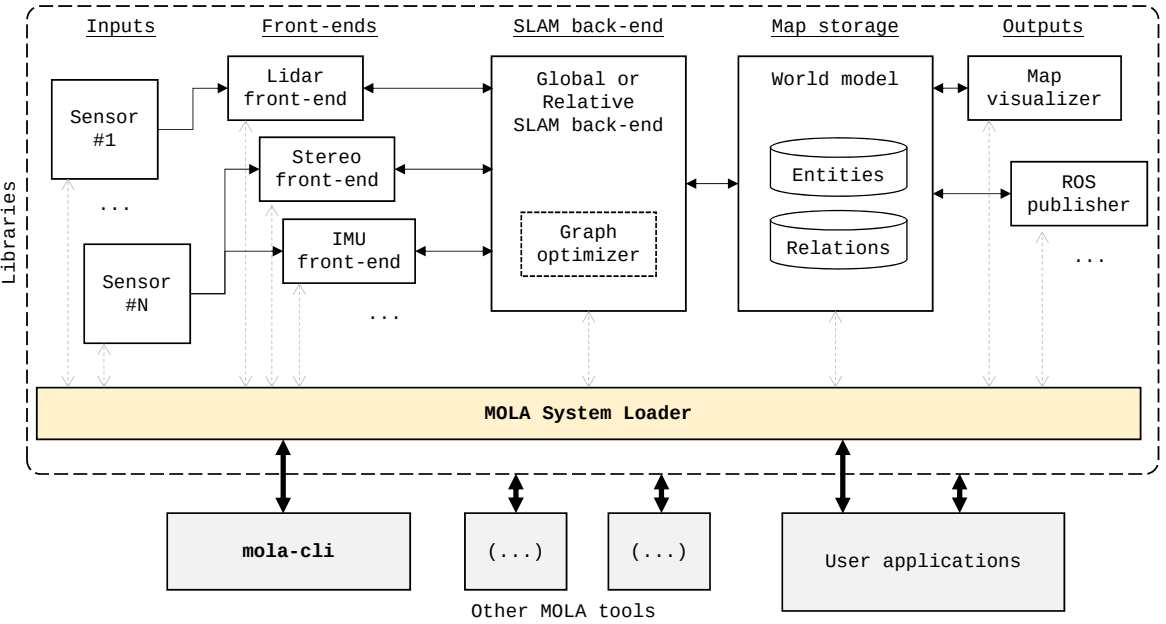
Firstly, we define the MOLA system as a set of modules, each module being the instantiation of a particular C++ class (implementing the ExecutableBase interface). Based on the differentiated role of each module in the SLAM system, a number of prototypical virtual base classes are provided for users to define their own modules of each type, ensuring the existence of a common API as the key for compatibility, easy reusability and interchangeability. The system loader is in charge of interpreting a SLAM-problem configuration file, loading the required libraries, finding and creating the required modules and launching their life cycle routine. It also allows running modules to find each other (either by name or by service type) for peer-to-peer connections to be established and allow the information and signals to flow forth and back throughout the system.
(Expand me!)
TODO: Add ExecutableBase life cycle figures.