ROS 2 API
This page reflects the topics and services that a MOLA system will expose when running a SLAM or LiDAR-odometry module. At present, this applies to:
Any MOLA system including the BridgeROS2 module: This module acts as a wrapper of
mola-kernelvirtual interfaces implemented in other MOLA modules and the ROS 2 system.
1. Nodes and launch files
1.1. ROS 2 node for LiDAR Odometry (LO) / LiDAR-inertial Odometry (LIO)
Note
It is recommended to start with the tutorial on how to build a map.
This launch file (view sources) runs MOLA-LO live on point clouds received from a ROS 2 topic, demonstrating a few features:
Tip
See the MOLA in ROS 2 cookbook for a configuration-by-configuration walkthrough (Simple vs Smoother, namespaced, GNSS modes, etc.) with live-editable commands.
Launching and visualizing LO in both,
mola_vizandRViz2(or use FoxGlove if preferred).How MOLA
mola_lidar_odometrypublishes the local map, the estimated trajectory, and /tf for the estimated odometry.
# Minimal LO use case (requires correct LiDAR sensor /tf):
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
lidar_topic_name:=ouster/points
# LO usage without sensor /tf:
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
lidar_topic_name:=ouster/points \
ignore_lidar_pose_from_tf:=True \
publish_localization_following_rep105:=False
This is how to use LiDAR-Inertial Odometry (LIO) by using LiDAR clouds plus an IMU:
# Example LIO usage for Ouster LiDAR + integrated IMU:
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
mola_deskew_method:=MotionCompensationMethod::IMU \
lidar_topic_name:=/ouster/points \
imu_topic_name:=/ouster/imu \
mola_tf_base_link:=os_sensor
This is how to use LiDAR-Inertial Odometry (LIO) by using LiDAR clouds plus an IMU, when no /tf is available for the sensor poses so you must manually specify them:
# Example LIO usage for LiDAR + IMU for Oxford Spires Dataset:
IMU_POSE_YAW=90 \
LIDAR_POSE_YAW=180 \
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
mola_deskew_method:=MotionCompensationMethod::IMU \
lidar_topic_name:=/hesai/pandar \
imu_topic_name:=/alphasense_driver_ros/imu \
ignore_lidar_pose_from_tf:=True \
ignore_imu_pose_from_tf:=True \
publish_localization_following_rep105:=False
To replay a recorded bag with simulated time (required when playing .mcap or .db3 bags):
# Terminal 1: launch MOLA-LO with sim time enabled:
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
lidar_topic_name:=/ouster/points \
use_sim_time:=true
# Terminal 2: play the bag and publish the /clock topic:
ros2 bag play /path/to/your/bag --clock
Note
Both use_sim_time:=true and --clock are required together.
--clock makes the bag publish on /clock; use_sim_time:=true
makes all nodes subscribe to it instead of the wall clock.
If your robot uses a ROS 2 namespace ROBOT_NS for all its sensor and tf topics, use:
# Minimal use case:
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
lidar_topic_name:=ouster/points \
use_namespace:=True \
namespace:=ROBOT_NS
To use with a 2D LiDAR, define the argument lidar_topic_type:=LaserScan, e.g.:
# Minimal use case:
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py \
lidar_topic_name:=/scan \
lidar_topic_type:=LaserScan \
mola_lo_pipeline:=../pipelines/lidar2d.yaml \
ignore_lidar_pose_from_tf:=False \
publish_localization_following_rep105:=True
How to invoke for a rosbag (.mcap, .db3)
You can also directly run MOLA-LO on a dataset instead of live ROS messages, which is normally more efficient. See MOLA-LO GUI apps for all the details.
To play a bag through the ROS 2 launch file with correct simulated time, use the
use_sim_time:=true argument together with ros2 bag play --clock.
See the Rosbag playback tab above for the full example.
Note however than MOLA-LO GUI apps can directly read rosbags
without the need to replay them.
# Example: run MOLA-LIO on a Ouster dataset.
MOLA_DESKEW_METHOD=MotionCompensationMethod::IMU \
MOLA_IMU_TOPIC=/ouster/imu \
MOLA_LIDAR_TOPIC=/ouster/points \
MOLA_TF_BASE_LINK=os_sensor \
mola-lo-gui-rosbag2 /path/to/your/dataset.mcap
All launch arguments
This listing is kept in sync with ros2-lidar-odometry.launch.py. You can always regenerate it locally with:
ros2 launch mola_lidar_odometry ros2-lidar-odometry.launch.py --show-args
Arguments (pass as <name>:=<value>):
enforce_planar_motion(defaultFalse): Whether to enforce z, pitch, and roll to be zero.estimate_geo_reference(default"") [Smoother only]: Whether to estimate the best geo-referencing for{enu} -> {map}from incoming GNSS readings. If empty (default), the pipeline YAML fallback is used (false) andgnss_mode:=live_georefmay flip it totrueautomatically.forward_ros_tf_odom_to_mola(defaultFalse): Whether to import an existing/tfodom → base_linkodometry (2DCObservationOdometry). Mutually exclusive withodom_topic_name.generate_simplemap(defaultFalse): Whether to create a.simplemap.gnss_mode(defaultnone): High-level GNSS usage:none | log_only | live_georef | relocalize.live_georefandrelocalizerequireuse_state_estimator:=True.gnss_topic_name(defaultgps): Topic name to listen forNavSatFixinput from a GNSS (e.g./gps).gpsfix_topic_name(defaultgpsfix): Topic name to listen forgps_msgs/GPSFixinput from a GNSS (e.g./gpsfix).ignore_imu_pose_from_tf(defaultfalse): Iftrue, the IMU pose is assumed to be at the origin (base_link). Leavefalseif you want to read the actual sensor pose from/tf.ignore_lidar_pose_from_tf(defaultfalse): Iftrue, the LiDAR pose is assumed to be at the origin (base_link). Leavefalseif you want to read the actual sensor pose from/tf.imu_gravity_avg_samples(default20): Number of IMU samples to average when estimating the gravity direction for pitch/roll correction.imu_gravity_correction(defaulttrue): Whether to use IMU accelerometer readings to constrain ICP pitch/roll (prevents vertical drift; safe to leave enabled even without an IMU).imu_gravity_max_age(default2.0): Maximum age [seconds] of IMU samples used for gravity alignment. Older samples are discarded.imu_gravity_sigma_deg(default2.0): Sigma [degrees] for the gravity-derived pitch/roll prior. Lower = more trust in IMU.imu_topic_name(defaultimu): Topic name to listen forImuinput (e.g./imu).imu_qos_reliability(defaultbest_effort): QoS reliability of the IMU subscription. Options:best_effortorreliable. Defaults tobest_effortper REP-2003. Set toreliableto match a reliable high-rate publisher (e.g. Ouster’s 640 Hz IMU) and avoid silent drops. The publisher must also bereliablefor end-to-end reliable delivery.imu_qos_depth(default50): QoS history depth of the IMU subscription. The default of 50 absorbs moderate executor stalls; raise (e.g. 200-1000) for high-rate IMUs consumed together with a heavy SLAM pipeline.lidar_qos_reliability(defaultbest_effort): QoS reliability of the LiDAR subscription. Options:best_effortorreliable. Seeimu_qos_reliabilityfor guidance.lidar_qos_depth(default50): QoS history depth of the LiDAR subscription.initial_localization_method(default""): Initial-localization method. Options:InitLocalization::FixedPose(start at identity or given pose),InitLocalization::FromStateEstimator(wait for smoother convergence, e.g. from GNSS),InitLocalization::PitchAndRollFromIMU(use IMU to estimate pitch/roll at startup, assumes sensor stationary). If empty (default), the pipeline YAML fallback is used (FixedPose) andgnss_mode:=relocalizemay switch it toFromStateEstimator.lidar_scan_validity_minimum_point_count(default100): Minimum number of points required in an incoming LiDAR scan for it to be processed; scans below this threshold are discarded.lidar_topic_name(required): Topic name to listen for LiDAR input, e.g./ouster/pointsforPointCloud2or/scanforLaserScan. Seelidar_topic_type.lidar_topic_type(defaultPointCloud2): The type of LiDAR topic to subscribe to. Options:PointCloud2orLaserScan.mola_bridge_odometry_frame(defaultodom): BridgeROS2’s odom/tfframe name (the REP-105 “odom” child or the parent of an externally-published odometry TF).mola_deskew_method(defaultMotionCompensationMethod::Linear): Motion-compensation (deskew) method for LiDAR scans. Options:MotionCompensationMethod::None,MotionCompensationMethod::Linear(constant-velocity),MotionCompensationMethod::IMU(requires an IMU topic; useuse_imu_for_lio:=Trueas the higher-level shortcut).mola_footprint_to_base_link_tf(default[0, 0, 0, 0, 0, 0]): Custom transformation betweenbase_footprintandbase_link, as[x, y, z, yaw_deg, pitch_deg, roll_deg].mola_initial_map_mm_file(default""): Optional path to a metric map.mmfile to load as the initial map.mola_initial_map_sm_file(default""): Optional path to a keyframes.simplemapfile to load.mola_lo_pipeline(default../pipelines/lidar3d-default.yaml): The LO pipeline configuration YAML file.mola_lo_reference_frame(defaultmap): Parent/tfframe of the localization update emitted by MOLA-LO (thereference_frameof itsLocalizationUpdate; see ROS 2 API docs on published/tf).mola_state_estimator_reference_frame(defaultmap): Parent/tfframe of the pose updates emitted by the MOLA State Estimator, and BridgeROS2’sreference_frameparameter.mola_tf_base_link(defaultbase_link): The/tfframe name for the robot base link.namespace(default""): Top-level ROS 2 namespace to push the MOLA stack into (together withuse_namespace:=True).odom_sensor_label(defaultodom_wheels):sensorLabelattached to observations fromodom_topic_name. Use distinct labels per source when fusing multiple external odometries.odom_topic_name(default""): If non-empty, BridgeROS2 subscribes directly to thisnav_msgs/Odometrytopic and forwards each message as a 3DCObservationRobotPose(6×6 covariance) — preferred for smoother fusion. Mutually exclusive withforward_ros_tf_odom_to_mola.publish_localization_following_rep105(defaultTrue): Whether the bridge publishes localization TFs asmap → odom(REP-105, true) or directlymap → base_link(false). REP-105 is incompatible with the smoother.start_active(defaultTrue): Whether MOLA-LO starts active (processing incoming sensor data) or idle.min_nearby_poses_occupied(default1): Minimum number of stored scans from a pose region before that region is considered “occupied” in the local map distance checker and no new keyframe is inserted there. The default of1reproduces the classic behavior. Increase to2or more for non-repetitive-scan lidars (e.g. Livox) so that multiple scans are accumulated from each location before moving on. Maps to the env varMOLA_MIN_NEARBY_POSES_OCCUPIEDand the pipeline YAML keylocal_map_updates.min_nearby_poses_occupied.simplemap_min_nearby_poses(default1): Same asmin_nearby_poses_occupiedbut for the simplemap keyframe insertion. Maps to the env varMOLA_SIMPLEMAP_MIN_NEARBY_POSESand the pipeline YAML keysimplemap.min_nearby_poses_occupied.start_mapping_enabled(defaultTrue): Whether MOLA-LO starts with map update enabled, or in localization-only mode.state_estimator_config_yaml(default""): Path to estimator YAML. If empty, it is auto-resolved based onuse_state_estimator.use_diagnostic_aggregator(defaultFalse): Launch a standalonediagnostic_aggregatorwith the bundled MOLA-LO config (publishes/diagnostics_aggforrqt_robot_monitor). Enable only for isolated bring-up/demos; leave disabled when a central aggregator is launched elsewhere in the robot stack. See mola_lo_diagnostics.use_imu_for_lio(defaultFalse): Iftrue, enables LIO mode (forcesMotionCompensationMethod::IMUfor deskew). Requires a workingimu_topic_name.use_mola_gui(defaultTrue): Whether to open the MolaViz GUI for live mapping visualization and control.use_namespace(defaultfalse): Whether to applynamespaceto the MOLA stack (remaps/tfand/tf_static).use_rviz(defaultTrue): Whether to launch RViz2 with the defaultlidar-odometry.rvizconfiguration.use_sim_time(defaultfalse): Iftrue, all nodes use the/clocktopic as their time source instead of the system wall clock. Enable this when replaying a rosbag withros2 bag play --clock.use_state_estimator(defaultFalse): Iftrue, usesStateEstimationSmoother(requires the optionalmola_state_estimation_smootherpackage).
Smoother-only arguments (applied only when use_state_estimator:=True):
navstate_kinematic_model(defaultKinematicModel::ConstantVelocity): Kinematic model for internal motion-model factors. Options:KinematicModel::ConstantVelocity,KinematicModel::Tricycle.navstate_sigma_random_walk_angacc(default10.0): Random-walk angular acceleration uncertainty [rad/s²].navstate_sigma_random_walk_linacc(default1.0): Random-walk linear acceleration uncertainty [m/s²].navstate_sliding_window_sec(default2.5): Time window [seconds] to keep past observations in the filter.
Configure sensor inputs for ROS 2 node and rosbag2 input
The following environment variables can be set to change the behavior of how BridgeROS2
handles input ROS 2 messages on sensor inputs.
Please, refer to the actual mola-cli launch files where these variables are defined:
Environment variables:
MOLA_TF_BASE_LINK(Default:"base_link"): The robot reference frame id in/tf. Used to get sensor poses with respect to the vehicle.MOLA_TF_FOOTPRINT_LINK(Default:base_footprint): If not empty, the node will broadcast a static /tf from base_footprint to base_link with the TF base_footprint_to_base_link_tf at start up.MOLA_TF_FOOTPRINT_TO_BASE_LINK(Default:'[0, 0, 0, 0, 0, 0]'): [x, y, z, yaw_deg, pitch_deg, roll_deg].MOLA_LIDAR_TOPIC(Default:'/ouster/points'): Thesensor_msgs/PointCloud2topic with raw LiDAR data (mandatory).MOLA_USE_FIXED_LIDAR_POSE(Default:false): If false, sensor pose will be retrieved from/tf. You can also set it to true and then the sensor pose will be given by these env. variables:LIDAR_POSE_X,LIDAR_POSE_Y,LIDAR_POSE_Z(in meters).LIDAR_POSE_YAW,LIDAR_POSE_PITCH,LIDAR_POSE_ROLL(in degrees).
MOLA_GNSS_TOPIC(Default:'/gps'): Thesensor_msgs/NavSatFixtopic with GNSS data (optional).MOLA_USE_FIXED_GNSS_POSE(Default:true): If false, sensor pose will be retrieved from/tf. You can also set it to true and then the sensor pose will be given by these env. variables:GNSS_POSE_X,GNSS_POSE_Y,GNSS_POSE_Z(in meters).GNSS_POSE_YAW,GNSS_POSE_PITCH,GNSS_POSE_ROLL(in degrees).
MOLA_IMU_TOPIC(Default:'/imu'): Thesensor_msgs/Imutopic with IMU data (optional).MOLA_USE_FIXED_IMU_POSE(Default:true): If false, sensor pose will be retrieved from/tf. You can also set it to true and then the sensor pose will be given by these env. variables:IMU_POSE_X,IMU_POSE_Y,IMU_POSE_Z(in meters).IMU_POSE_YAW,IMU_POSE_PITCH,IMU_POSE_ROLL(in degrees).
More LO parameters
If using the default pipeline, the lidar3d-gicp.yaml pipeline file defines plenty
of additional parameters and options that you can explore.
See also the docs for the ROS 2 API and this tutorial on how to save and load a map using ROS 2 MOLA-LO nodes.
2. Map loading / saving
During a live SLAM run, BridgeROS2 will look for modules implementing
MapServer and will expose
these ROS 2 services to load or save the current map:
/map_load: See ROS docs for mola_msgs/MapLoad/map_save: See ROS docs for mola_msgs/MapSave
Example ROS 2 cli service calls
To save the current map:
ros2 service call /map_save mola_msgs/srv/MapSave "map_path: '/tmp/my_map_file_prefix'"
To load a map from disk:
ros2 service call /map_load mola_msgs/srv/MapLoad "map_path: '/tmp/my_map_file_prefix'"
Note that filename extension should not be given, since each service implementation may add a different extension, or even save several files that should all, together, be later on loaded as one to load the map again.
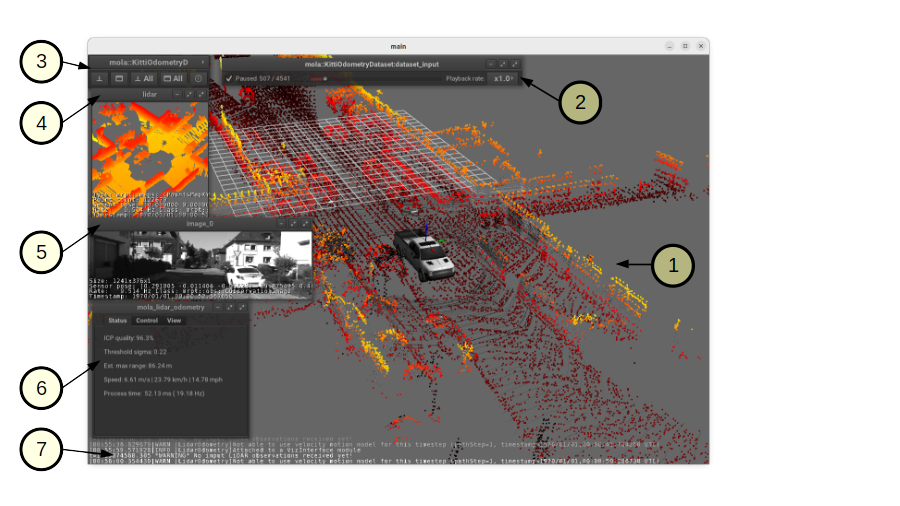
Alternatively, you can enable saving the map when mapping is ended by checking the corresponding checkbox in the MOLA-LO GUI (block “6” below):
3. Re-localization
There are two ROS services that can be used to enforce the MOLA subsystem to relocalize, for example, to address the problem of initial localization:
3.1. Specify the new localization and its initial uncertainty
The service /relocalize_near_pose (mola_msgs/srv/RelocalizeNearPose) can be
used to directly request a relocalization in a given area (a pose with uncertainty):
ros2 service call /relocalize_near_pose mola_msgs/srv/RelocalizeNearPose "{ pose: { header: { stamp: {sec: 0, nanosec: 0}, frame_id: 'map' }, pose: { pose: { position: {x: 1.0, y: 2.0, z: 0.0}, orientation: {x: 0.0, y: 0.0, z: 0.0, w: 1.0} }, covariance: [1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 1.0] } } }"
3.2. Request automatic relocalization from GNSS (GPS)
In geo-referenced maps, it is possible to request MOLA-LO to use incoming GPS readings to bootstrap LiDAR-based localization.
Note
This method requires the use of the smoother state estimator.
Request a relocalization now with:
ros2 service call /relocalize_from_state_estimator mola_msgs/srv/RelocalizeFromStateEstimator "{}"
Depending on the parameters, it may take some time for the re-localization to take effect.
4. Published /tf frames
The frames of reference (`frame_id`s) at work when using MOLA depend on your system configuration:
Using just
mola_lidar_odometry: Two situations here depending on the ROS launch argumentpublish_localization_following_rep105:Strictly following ROS REP-105 in systems with wheels (encoders-based) high-frequency odometry, or
Not following
REP-105(e.g. if you do not have wheels odometry).
Using state estimation data fusion (this case does not follow
REP-105), and
And orthogonal to both above, whether the map is geo-referenced or not.
The diagrams below show the cases of following or not following ROS REP-105 for the different situations listed above:
For cases with ground robots with wheel-based odometry:
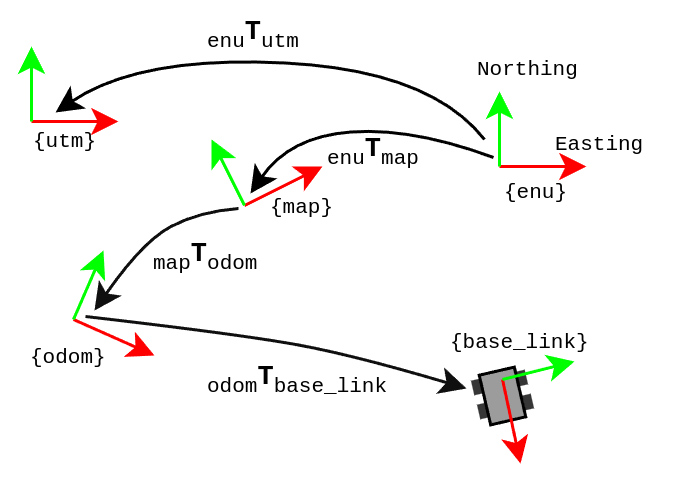
This is who is responsible of publishing each transformation:
odom → base_link: Wheel odometry module. High-frequency, relatively accurate in the short term, but drifts in the long term.map → odom: Localization module, which corrects the odometry drift.enu → {map, utm}: Published bymrpt_map_server(github) ormola_lidar_odometrymap loading service if fed with a geo-referenced metric map (.mm) file.
Note
Internally, the MOLA localization module (mola_lidar_odometry or a
state estimator) always emits map → base_link updates.
BridgeROS2 is what splits
that into the REP-105 map → odom /tf broadcast by querying the
current odom → base_link from /tf and composing it out.
When using just a LiDAR as single sensor.
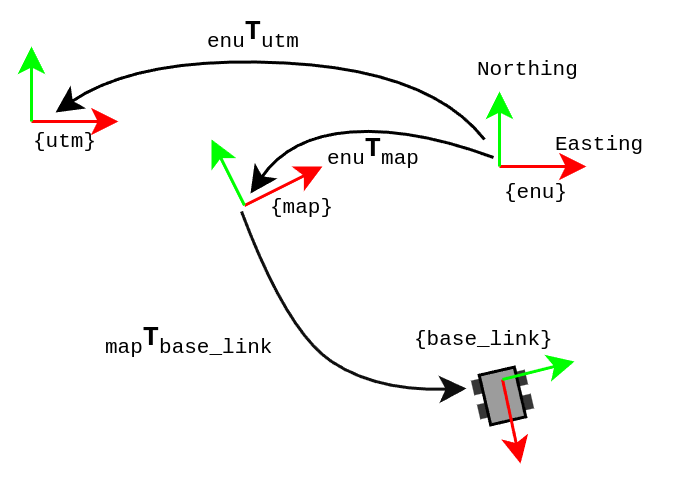
This is who is responsible of publishing each transformation:
map → base_link: Localization module.enu → {map, utm}: Published bymrpt_map_server(github) ormola_lidar_odometrymap loading service if fed with a geo-referenced metric map (.mm) file.
When using state estimation data fusion: applicable if having just one LiDAR sensor, or LiDAR + wheel odometry, or several odometry sources, optionally GNNS (GPS) and IMU, etc.
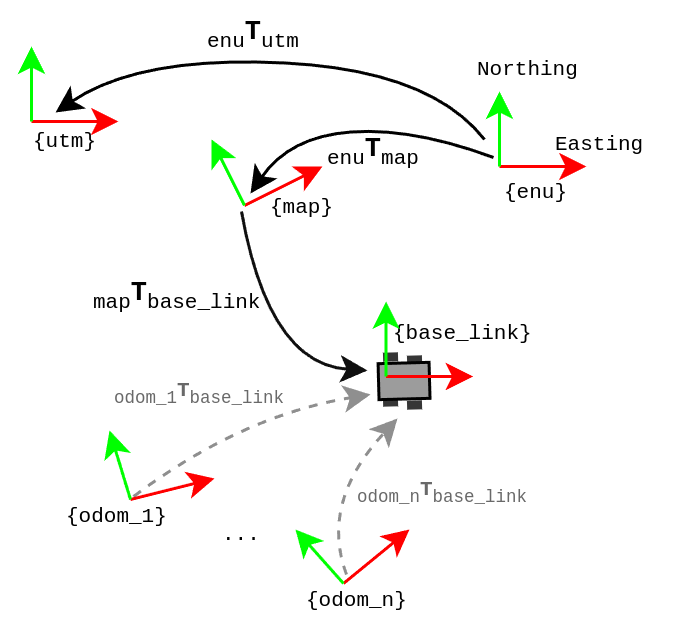
This is who is responsible of publishing each transformation:
odom_{i} → base_link: One or more odometry sources.map → base_link: Published by state estimation data fusion.enu → {map, utm}: Published bymrpt_map_server(github) ormola_lidar_odometrymap loading service if fed with a geo-referenced metric map (.mm) file.
Note
External odometry sources must enter MOLA as nav_msgs/Odometry
topics (consumed as observations), not via /tf. If a wheel
driver also broadcasts odom → base_link to /tf while the
state estimator publishes map → base_link, base_link
ends up with two parents and tf2 rejects the tree. See the
cookbook §4.4.
Note
For non geo-referenced maps, all frames remain the same but utm and enu will not exist.
Definition of the frames above:
base_link: The robot reference frame. For ground vehicles, normally placed at the center of the rear axle.base_footprint(optional): The projection ofbase_linkon the ground plane. In MOLA, this frame is published by BridgeROS2 as a child ofbase_link.odom,odom_1,…odom_n: The arbitrary origin for odometry measurements. There may be different odometry sources: wheels, LiDAR odometry, visual odometry, etc.map: The origin of the reference metric map used for localization.enu: For geo-referenced maps, the North (yaxis), East (xaxis), Up (zaxis) frame for which we have reference geodetic coordinates (latitude and longitude). Different maps built in the same zone will surely have differentenuframes, since it is defined by collected GNSS measurements.utm: The origin of the UTM zone in whichenufalls. Unlikeenu, it is independent of the trajectory followed while building the map.
5. Subscribed topics (subscribe YAML block)
BridgeROS2 subscribes to ROS 2 sensor topics listed under the subscribe
key in its YAML parameters. Each entry in the sequence must contain at least
the following fields:
Field |
Required |
Description |
|---|---|---|
|
Yes |
ROS 2 topic name (e.g. |
|
Yes |
One of: |
|
Yes |
Label assigned to the MOLA observation forwarded to front-ends. |
|
No |
|
|
No |
Boolean (default |
Example:
subscribe:
# Slot always active:
- topic: /imu
msg_type: Imu
output_sensor_label: "imu"
# Optional slot - disabled when ODOM2_TOPIC is unset:
- topic: ${ODOM2_TOPIC|}
msg_type: Odometry
output_sensor_label: "${ODOM2_LABEL|odom2}"
6. Published topics
Write me!
7. Map publishing
There are three ways of publishing maps to ROS:
Using
mrpt_map_server(github): the recommended way for static, previously-built maps, if you are not using MOLA for localization but want the map published for localization using the particle filter method or for your own purposes, e.g. for visualization in RViz, processing in a custom node, etc. In this case, one ROS topic will be published for each map layer, as described in the package documentation. See also this tutorial.During a live map building process (e.g. MOLA-LO).
Topics
Using the default MOLA LiDAR odometry pipeline, only one map topic will be generated during live mapping:
Name:
/lidar_odometry/localmap_pointsType:
sensor_msgs/PointCloud2
If using MOLA-LO for localization-only, it will send out the loaded map. In this case, there will be as many topics as map layers in the
*.mmfile. See also this tutorial.
In cases (2)-(3), BridgeROS2 will look for modules implementing
MapSourceBase and will publish
one topic named <METHOD>/<LAYER_NAME> for each map layer.
The metric map layer C++ class will determine the ROS topic type to use.
Map topics are “latched” (so that new subscribers will receive the last
published map immediately after subscribing), and will be re-published only
if mapping is enabled and the map has changed since the last publication.
8. Runtime dynamic reconfiguration
MOLA modules may expose a subset of their parameters through an interface that allows runtime reconfiguration via ROS 2 service requests:
7.1. Runtime parameters for mola_lidar_odometry
List all existing parameters:
ros2 service call /mola_runtime_param_get mola_msgs/srv/MolaRuntimeParamGet
Example output
requester: making request: mola_msgs.srv.MolaRuntimeParamGet_Request() response: mola_msgs.srv.MolaRuntimeParamGet_Response(parameters='mola::LidarOdometry:lidar_odom:\n active: true\n generate_simplemap: false\n mapping_enabled: true\n')Returned
parametersas YAML:mola::LidarOdometry:lidar_odom: active: true generate_simplemap: false mapping_enabled: true
Documented parameters:
active: Whether MOLA-LO should process incoming sensor data (active: true) or ignore them (active: false).
Copy & paste commands for active
# active: true
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n active: true\n\"}"
# active: false
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n active: false\n\"}"
mapping_enabled: Whether MOLA-LO should update the localmap (true) or just use it in localization-only mode (false).
Copy & paste commands for mapping_enabled
# mapping_enabled: true
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n mapping_enabled: true\n\"}"
# mapping_enabled: false
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n mapping_enabled: false\n\"}"
generate_simplemap: Whether MOLA-LO should build the keyframes-based map (apart of the local metric map), so you end up with a*.simplemapfile.
Copy & paste commands for generate_simplemap
# generate_simplemap: true
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n generate_simplemap: true\n\"}"
# generate_simplemap: false
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n generate_simplemap: false\n\"}"
reset_state: This is actually not a real state variable, but a trigger to request MOLA-LO to reset its state, effectively restarting mapping from scratch. It resets the internal local map, the simplemap (keyframe map). The state estimator, since it is in a different independent module, is not affected.
Copy & paste commands to reset map
ros2 service call /mola_runtime_param_set mola_msgs/srv/MolaRuntimeParamSet \
"{parameters: \"mola::LidarOdometry:lidar_odom:\n reset_state: true\n\"}"
9. Initial localization
9.1. Lidar-Odometry (LO)
When the LO system is started, there are different situations:
The system is started without any former map. Here, the default is starting at the identity SE(3) pose, that is, at the origin (0,0,0), and that should be enough in most common cases.
The system is started with a former known map. Here, correctly localizing within that map before trying to update it is critical to avoid ruining the map. Also, finding the correct initial pose is a non trivial problem and requires specific methods.
For the latter case, it is important to disable mapping at start up (see the start_mapping_enabled:=False launch
argument above) and only enable mapping once the system is correctly localized, and if
the user really wants to update the map. Keeping mapping disabled for the whole run is actually desired for robots
operating in a known, pre-mapped environment.
Then, the user can choose between:
Requesting re-localization in a given area or from GNSS readings, as described in this section above.
Selecting one of the available initial localization methods directly set in the pipeline configuration file, or via a ROS2 launch argument, so that method is used straight away at startup.
These are the available initial localization methods, that can be used in the launch argument
initial_localization_method:=xxxx launch argument (listed above):
How to select initial localization without ROS API
If LO is launched independently of a ROS2 system, e.g. using the
command-line or GUI LO tools,
the initial localization method can be set via the environment variable
MOLA_LO_INITIAL_LOCALIZATION_METHOD which should be set to any of the options
listed below. For example, to set the initial localization method to FromStateEstimator:
MOLA_LO_INITIAL_LOCALIZATION_METHOD="InitLocalization::FromStateEstimator" \
mola_lidar_odometry_cli ... \ # the rest as usual
InitLocalization::FixedPose: Initializes around a given SE(3) pose with covariance.InitLocalization::FromStateEstimator: In combination with the smoother state estimator, can be used to initialize based on accumulated evidence of geo-referenced positioning based on low-cost GNSS readings, wheels odometry, IMU, or any sensible combination of sensors. See smoother state estimator.InitLocalization::PitchAndRollFromIMU: Without using the external state estimator, this method uses the IMU to estimate the pitch and roll angles of the robot, and then initializes the localization system with that information assuming sensor is roughly stationary at startup. This is useful for systems that are not perfectly level, such as hand-held devices, drones, etc. since it will remove the apparent tilt of the ground plane.