Dataset conversions
This page gives instructions on how to convert robotics datasets between ROS 1 and ROS 2 bag files or live messages, MRPT’s cross-platform RawLog format, and the custom formats of popular robotics and computer vision datasets.
1. Dataset formats
Robotics datasets consist of sequences of raw sensory data as captured by a mobile robot, a vehicle, or just a hand-held device, as they move through the environment.
Each robotic framework or library has defined its own formats over time:
ROS 1 introduced rosbags (~2007) as a binary serialization storage for heterogeneous ROS messages.
ROS 2 (~2014) improved rosbags, which now can use different storage implementations (sqlite3, mcap), and are more efficient and flexible than older versions.
MRPT, on which MOLA is internally based on, defined its own serialized dataset format (~2005) named RawLogs, which is ensured to be portable across operative systems, backwards compatible across MRPT versions, and processor architecture independent.
Note
Apart of these standardized formats, many robotic datasets have their own custom data layout (e.g. one binary file for each 3D LiDAR scan or image). MOLA makes easy reading them by providing adapter modules that can read the most popular datasets (see list) through unified C++ APIs (class mola::OfflineDatasetSource) or re-publishing them to ROS.
2. rosbag ⇒ rawlog
To convert a ROS bag into a RawLog, you need two items:
The program
rosbag2rawlog, andthe configuration file specifying what ROS messages should be converted.
There are two versions of rosbag2rawlog, for ROS 1 and ROS 2 bags:
rosbag2rawlog for ROS 2 bags. It is shipped with the ROS package mrpt_rawlog
so it can be installed with:
sudo apt install ros-${ROS_DISTRO}-mrpt-rawlog
rosbag2rawlog for ROS 1 bags belongs to upstream MRPT, and it is generated only if
ROS 1 is detected at cmake configuration time. You can either build MRPT from sources after activating
your ROS 1 environment, or install the Ubuntu package mrpt-apps, which already ships rosbag2rawlog
for Ubuntu versions <=22.04 (In Ubuntu 24.04, ROS 1 packages were removed upstream).
To ensure having the latest version, consider installing it from the PPA.
Note
As of 2025, there is an ongoing effort to move all ROS-related apps and bridge libraries into its own repository, which will be the single repository for all MRPT-ROS stuff after the release of MRPT 3.0.0.
Once you have rosbag2rawlog installed it can be invoked like:
rosbag2rawlog CLI arguments
$ rosbag2rawlog --help
USAGE:
rosbag2rawlog [-b <base_link>] [-w] -c <config.yml> -o
<dataset_out.rawlog> [--] [--version] [-h] <log.bag> ...
Where:
-b <base_link>, --base-link <base_link>
Reference /tf frame for the robot frame (Default: 'base_link')
-w, --overwrite
Force overwrite target file without prompting.
-c <config.yml>, --config <config.yml>
(required) Config yaml file (*.yml)
-o <dataset_out.rawlog>, --output <dataset_out.rawlog>
(required) Output dataset (*.rawlog)
--, --ignore_rest
Ignores the rest of the labeled arguments following this flag.
--version
Displays version information and exits.
-h, --help
Displays usage information and exits.
<log.bag> (accepted multiple times)
(required) Input bag files (required) (*.bag)
For example:
$ rosbag2rawlog -c config.yaml -o output.rawlog input.mcap
With the config.yaml file created as explained below.
2.1. YAML config file format
rosbag2rawlog needs an input configuration file to determine what ROS messages in the bag are to be imported.
The rest will be discarded, after emitting a warning to the terminal.
Example: basic Ouster LiDAR import
# Config file for rosbag2rawlog. It must contain a top-level "sensors" node
sensors:
# Then, one node per sensor to convert. This name will be used as
# sensorLabel in MRPT observations.
lidar:
# Type: C++ class name (see mrpt::obs)
type: 'CObservationPointCloud'
topic: '/ouster/points'
# If uncommented, /tf data will be ignored for this sensor pose:
#fixed_sensor_pose: "0 0 0 0 0 0" # 'x y z yaw_deg pitch_deg roll_deg''
Example: Newer College Dataset import
# Config file for rosbag2rawlog. It must contain a top-level "sensors" node
sensors:
# Then, one node per sensor to convert. This name will be used as
# sensorLabel in MRPT observations.
lidar:
# Type: C++ class name (see mrpt::obs)
type: 'CObservationPointCloud'
# Parameters for this particular type of sensor.
# Topic to subscribe for the pointcloud:
topic: '/os_cloud_node/points'
fixed_sensor_pose: "0 0 0 0 0 0" # 'x y z yaw_deg pitch_deg roll_deg''
cam0:
type: 'CObservationImage'
image_topic: '/alphasense_driver_ros/cam0/compressed'
fixed_sensor_pose: "0 0 0 0 0 0" # 'x y z yaw_deg pitch_deg roll_deg''
Example: Oxford Spires Dataset
To import sequences from the Oxford Spires dataset to MRPT format:
# Config file for rosbag2rawlog. It must contain a top-level "sensors" node
sensors:
# Then, one node per sensor to convert. This name will be used as
# sensorLabel in MRPT observations.
lidar:
# Type: C++ class name (see mrpt::obs)
type: "CObservationPointCloud"
# Parameters for this particular type of sensor.
# Topic to subscribe for the pointcloud:
topic: "/hesai/pandar"
fixed_sensor_pose: "0.0 0.0 0.124 180 0 0" # 'x y z yaw_deg pitch_deg roll_deg'
# pCL_CI : (x,y,z,yaw,pitch,roll)=(-0.0078,-0.0190,0.0705,90.63deg,-0.13deg,0.17deg)
#T_base_imu_t_xyz_q_xyzw: [-0.018, 0.006, 0.058, 0.0, 0.0, 0.707, 0.707] # qx qy qz qw
#T_base_lidar_t_xyz_q_xyzw: [0.0, 0.0, 0.124, 0.0, 0.0, 1.0, 0.0] # qx qy qz qw
imu:
type: "CObservationIMU"
topic: "/alphasense_driver_ros/imu"
fixed_sensor_pose: "-0.018 0.006 0.058 90 0 0" # 'x y z yaw_deg pitch_deg roll_deg'
# cam0:
# type: "CObservationImage"
# image_topic: "/alphasense_driver_ros/cam0/debayered/image/compressed"
# fixed_sensor_pose: "0 0 0 0 0 0" # 'x y z yaw_deg pitch_deg roll_deg'' # COMPUTE PROPERLY!
Example: LiDAR + wheels odometry from /odom
# Config file for rosbag2rawlog. It must contain a top-level "sensors" node
sensors:
# Then, one node per sensor to convert. This name will be used as
# sensorLabel in MRPT observations.
lidar:
# Type: C++ class name (see mrpt::obs)
type: 'CObservationPointCloud'
topic: '/ouster/points'
# If uncommented, /tf data will be ignored for this sensor pose:
#fixed_sensor_pose: "0 0 0 0 0 0" # 'x y z yaw_deg pitch_deg roll_deg''
odom:
type: 'CObservationOdometry'
topic: '/odom'
Example: LiDAR + wheels odometry from /tf
# Config file for rosbag2rawlog. It must contain a top-level "sensors" node
sensors:
# Then, one node per sensor to convert. This name will be used as
# sensorLabel in MRPT observations.
lidar:
# Type: C++ class name (see mrpt::obs)
type: 'CObservationPointCloud'
topic: '/ouster/points'
# If uncommented, /tf data will be ignored for this sensor pose:
#fixed_sensor_pose: "0 0 0 0 0 0" # 'x y z yaw_deg pitch_deg roll_deg''
# If provided, odometry observations will be generated from /tf messages
# from `odom_frame_id` to `base_link` (frame_id can be changed via cli arguments):
odom_from_tf:
sensor_label: 'odom' # mandatory entry
#odom_frame_id: '/odom'
3. rawlog ⇒ ROS
For ROS 1 and ROS 2.
Write me!
4. ROS1 ⇒ ROS2
One way to use rosbags from ROS 1 with MOLA is to port them to ROS 2 bags.
You can use the Python package rosbags to perform the conversion,
like in this example:
rosbags-convert --src my_ros1.bag --dst my_ros2.mcap --dst-storage mcap
An alternative is to use rosbag2rawlog (the ROS 1 version!) to convert them to RawLogs, then use them as input to MOLA.
5. MOLA data set module ⇒ ROS
All you need is to put together a MOLA launch YAML file with:
A dataset source module.
The ros2bridge module.
and launch it using mola-cli. See existing ROS launch examples under ros2-launch (mola_demos package), with corresponding MOLA cli launch files in the mola-cli-launchs directory.
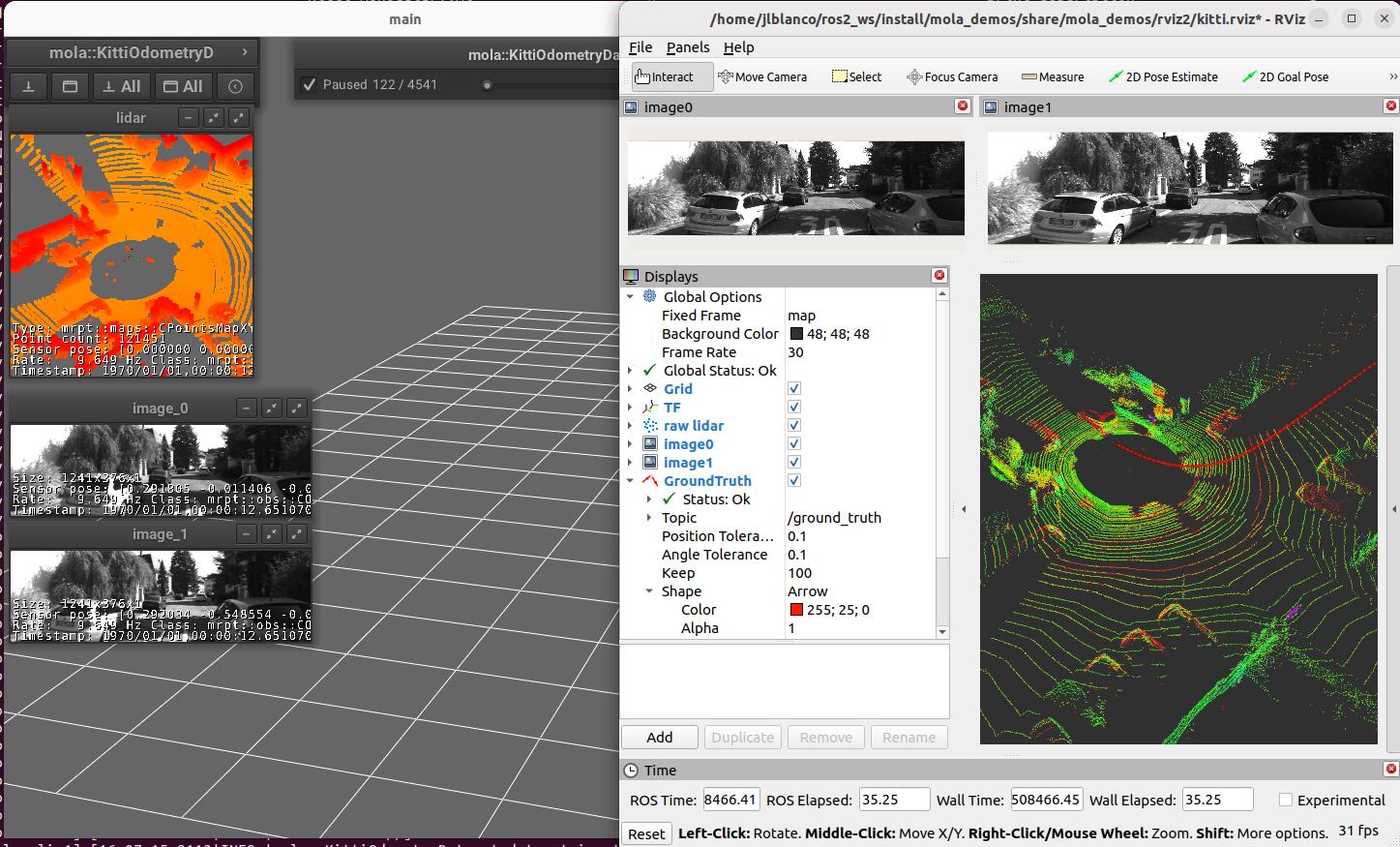
Example #1: play back a KITTI dataset sequence to ROS 2
ros2 launch mola_demos ros-kitti-play.launch.py kitti_sequence:=01
Result: the mola_viz GUI + RViz.
Example #2: play back a Mulran dataset sequence to ROS 2
Refer to the complete tutorial.
6. Point-cloud files ⇒ .mm metric maps
In some cases, you may want to import point-cloud files in popular formats (e.g. PCD, LAS, etc.)
as a layer within a metric map in mp2p_icp’s metric map format (*.mm files).
Providing specialized converter programs for each format would require depending on many larger libraries
so, instead of that approach, mp2p_icp provides one single program (Application: txt2mm) to import
point-cloud files in text format (e.g. .txt, .csv).
Therefore, the remaining step is to convert your point-cloud files to text format. Common cases are described below:
6.1. PCD files
PCD files are serialized point-clouds as defined in the PCL library.
Example python script to convert PCD to text
#!/bin/env python3
# Save as 'pcd2txt.py'
import open3d as o3d
import numpy as np
import pandas as pd
import sys
# Load PCD file
pcd = o3d.io.read_point_cloud(sys.argv[1])
# Convert to numpy array
points = np.asarray(pcd.points)
# If colors exist
if pcd.has_colors():
colors = np.asarray(pcd.colors)
data = np.hstack((points, colors))
header = "# x y z r g b"
else:
data = points
header = "# x y z"
# Save to TXT
np.savetxt(sys.argv[1] + ".txt", data, fmt="%.6f", header=header, comments='')
Then, you can convert a PCD file to text format with:
./pcd2txt.py input.pcd
6.2. LAS files
LAS files can be converted to text format using the las2txt (or las2txt64) program,
which is part of the LAStools library.
Once installed or built from sources, you can convert a LAS file to text format with:
# If you only want XYZ coordinates (no color):
las2txt64 -i input.las -o output.txt -parse xyz
# For .las files with RGB color:
las2txt64 -i input.las -o output.txt -parse xyzRGB -scale_RGB_to_8bit