Demo: Graph SLAM from a dataset in g2o plain text format
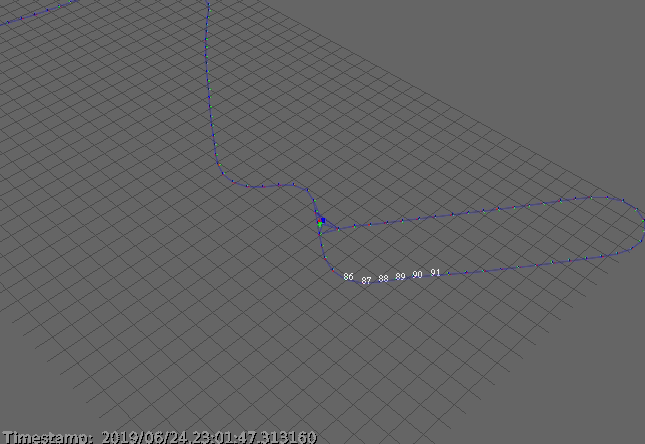
This demo shows how to launch a 2D or 3D Graph SLAM (pose graph) system reading pose-to-pose constraints from a .g2o text file, which are processed sequentially. By manipulating the execution rate of the G2O publisher (mola::G2ODataset) and that of the SLAM back-end (mola::ASLAM_gtsam) we can move between processing edges one by one, up to optimize the entire dataset at once.
Note that the SLAM solver can be also switched between sequential (iSAM2) and batch (Levenberg-Marquardt); this is independent of how fast new edges are appended to the SLAM problem.
Usage
cd mola/demos
mola-cli pose_graph_g2o_file.yml