Basics
1. Data structures
Metric maps: point clouds, and more
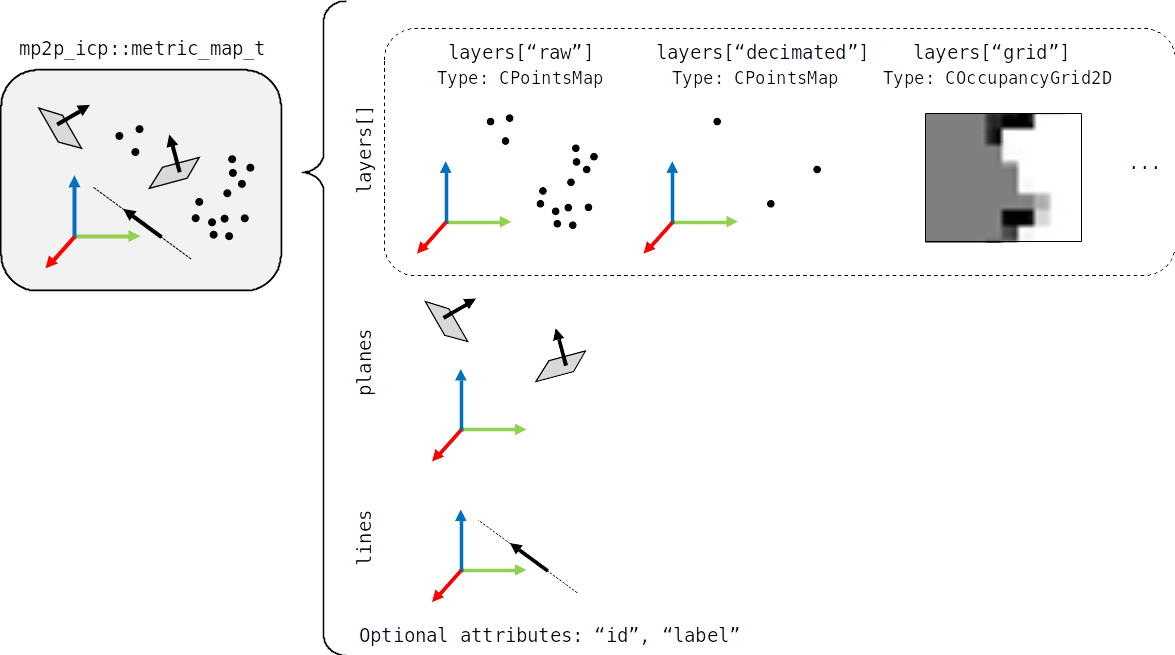
The basic data class is metric_map_t. It comprises:
A set of map layers, each one an instance of a generic mrpt::maps::CMetricMap, typically point clouds (mrpt::maps::CGenericPointsMap <https://docs.mrpt.org/reference/latest/class_mrpt_maps_CGenericPointsMap.html> or mrpt::maps::CSimplePointsMap) but may hold also 2D grid maps (mrpt::maps::COccupancyGridMap2D) or 3D octomaps (mrpt::maps::COctoMap). Layers are indexed by a name (
std::string).Other geometric entities: lines, planes.
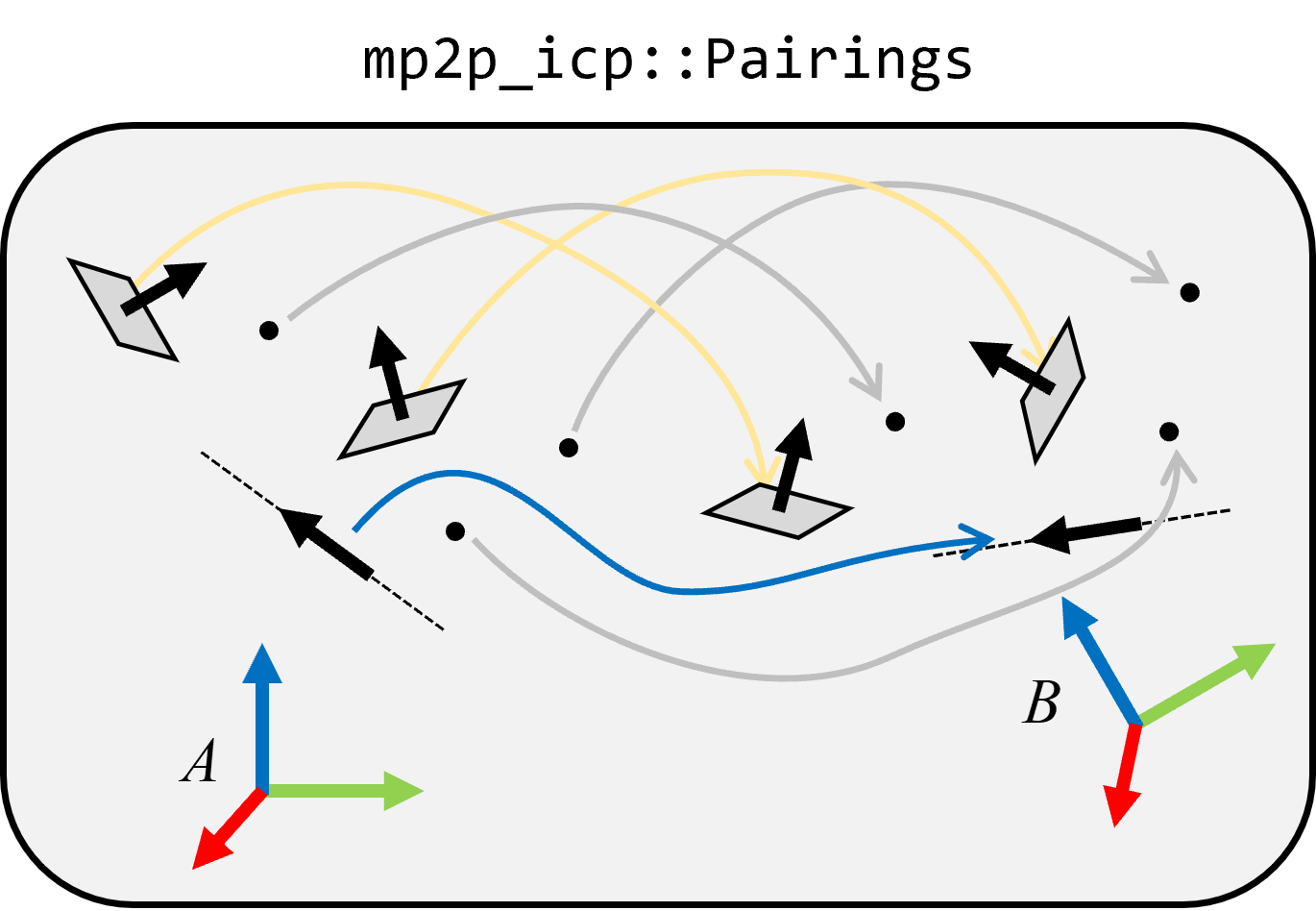
Pairings
Simple-maps
Simplemaps are key frame-based maps. Each key-frame contains a SE(3) pose (optionally, including uncertainty) along with raw sensor observations gathered from that pose, and optional metadata. An example of standardized metadata is the local frame velocity at the moment of recording the sensor data, including a small window of IMU raw readings, essential to perform accurate motion compensation.
Although the corresponding C++ class (mrpt::maps::CSimpleMap) is defined in the MRPT project, we enumerate it here as it is a fundamental data structure for this package and the whole MOLA framework.
2. Algorithms
Write me!
3. YAML pipeline definition files
Write me!